-
1 скорость интерфейса
скорость интерфейса
скорость передачи битов в интерфейсе
скорость на стыке
—
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > скорость интерфейса
-
2 скорость передачи интерфейса системы
скорость передачи интерфейса системы
Количество битов (двоичных цифр), передаваемых за единицу времени в цифровом сигнале через интерфейс системы. В одной кабельной системе может одновременно использоваться несколько скоростей передачи интерфейса (МСЭ-Т G.972).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
Русско-английский словарь нормативно-технической терминологии > скорость передачи интерфейса системы
-
3 скорость передачи данных в бодах
скорость передачи данных в бодах
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]
скорость передачи данных
Используется в различных ситуациях, например при настройке последовательного интерфейса между компьютером и принтеров.
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]
скорость передачи в бодах
1 бод = 1 бит/с = 1 знак/с = 1 символ/с
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > скорость передачи данных в бодах
-
4 переменная скорость передачи, осуществляемой не в реальном времени
переменная скорость передачи, осуществляемой не в реальном времени
Тип неравномерного и критичного к задержкам трафика с переменной скоростью передачи, который свойственен режиму связи без установления соединения. Вид обслуживания nrt-VBR предназначен для передачи коротких пакетных сообщений, к которым предъявляются повышенные требования по достоверности и безопасности, например, обмен банковскими данными, заказ авиабилетов и т.п. Впервые определен в описании интерфейса UNI 3.1 Форума ATM в 1994 г.
Ср. rt-VBR.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
EN
Русско-английский словарь нормативно-технической терминологии > переменная скорость передачи, осуществляемой не в реальном времени
-
5 интерфейс RS-485
интерфейс RS-485
Промышленный стандарт для полудуплексной передачи данных. Позволяет объединять в сеть протяженностью 1200 м до 32 абонентов.
[ http://www.morepc.ru/dict/]Интерфейс RS-485 - широко распространенный высокоскоростной и помехоустойчивый промышленный последовательный интерфейс передачи данных. Практически все современные компьютеры в промышленном исполнении, большинство интеллектуальных датчиков и исполнительных устройств, программируемые логические контроллеры наряду с традиционным интерфейсом RS-232 содержат в своем составе ту или иную реализацию интерфейса RS-485.
Интерфейс RS-485 основан на стандарте EIA RS-422/RS-485.
К сожалению, полноценного эквивалентного российского стандарта не существует, поэтому в данном разделе предлагаются некоторые рекомендации по применению интерфейса RS-485.
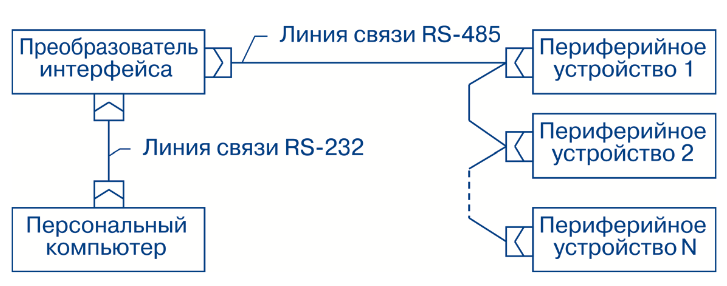
Традиционный интерфейс RS-232 в промышленной автоматизации применяется достаточно редко. Сигналы этого интерфейса передаются перепадами напряжения величиной (3...15) В, поэтому длина линии связи RS-232, как правило, ограничена расстоянием в несколько метров из-за низкой помехоустойчивости. Интерфейс RS-232 имеется в каждом PC–совместимом компьютере, где используется в основном для подключения манипулятора типа “мышь”, модема, и реже – для передачи данных на небольшое расстояние из одного компьютера в другой. Передача производится последовательно, пословно, каждое слово длиной (5...8) бит предваряют стартовым битом
и заканчивают необязательным битом четности и стоп-битами.
Интерфейс RS-232 принципиально не позволяет создавать сети, так как соединяет только 2 устройства (так называемое соединение “точка - точка”).

Сигналы интерфейса RS-485 передаются дифференциальными перепадами напряжения величиной (0,2...8) В, что обеспечивает высокую помехоустойчивость и общую длину линии связи до 1 км (и более с использованием специальных устройств – повторителей). Кроме того, интерфейс RS-485 позволяет создавать сети путем параллельного подключения многих устройств к одной физической линии (так называемая “мультиплексная шина”).
В обычном PC-совместимом персональном компьютере (не промышленного исполнения) этот интерфейс отсутствует, поэтому необходим специальный адаптер - преобразователь интерфейса RS-485/232.
Наша компания рекомендует использовать полностью автоматические преобразователи интерфейса, не требующие сигнала управления передатчиком. Такие преобразователи, как правило, бывают двух видов:- преобразователи, требующие жесткого указания скорости обмена и длины передаваемого слова (с учетом стартовых, стоповых бит и бита четности) для расчета времени окончания передачи: например, преобразователь ADAM-4520 производства компании Advantech. Все параметры задаются переключателями в самом преобразователе, причем для задания этих параметров корпус преобразователя необходимо разобрать;
- преобразователи на основе технологий “Self Tuner” и им подобных, не требующие никаких указаний вообще, и, соответственно, не имеющие никаких органов управления: например, преобразователь I-7520 производства компании ICP DAS. Данный преобразователь предпочтительнее для использования в сетях с приборами МЕТАКОН.
В автоматических преобразователях выходы интерфейса RS-485 обычно имеют маркировку “DATA+” и “DATA-“. В I-7520 и ADAM-4520 вывод “DATA+” функционально эквивалентен выводу “A” регулятора МЕТАКОН, вывод “DATA-“ - выводу “B”.
Устройства, подключаемые к интерфейсу RS-485, характеризуются важным параметром по входу приемопередатчика: “единица нагрузки” (“Unit Load” - UL). По стандарту в сети допускается использование до 32 единиц нагрузки, т.е. до 32 устройств, каждое из которых нагружает линию в 1 UL. В настоящее время существуют микросхемы приемопередатчиков с характеристикой менее 1 UL, например - 0,25 UL. В этом случае количество физи
чески подключенных к линии устройств можно увеличить, но суммарное количество UL в одной линии не должно превышать 32.
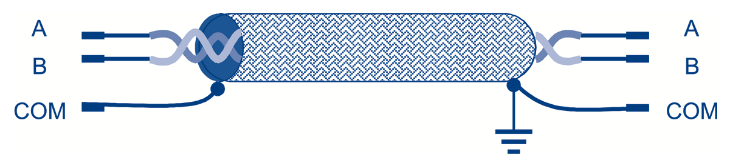
В качестве линии связи используется экранированная витая пара с волновым сопротивлением ≈120 Ом. Для защиты от помех экран (оплетка) витой пары заземляется в любой точке, но только один раз: это исключает протекание больших токов по экрану из-за неравенства потенциалов “земли”. Выбор точки, в которой следует заземлять кабель, не регламентируется стандартом, но, как правило, экран линии связи заземляют на одном из ее концов.
Устройства к сети RS-485 подключаются последовательно, с соблюдением полярности контактов A и B:
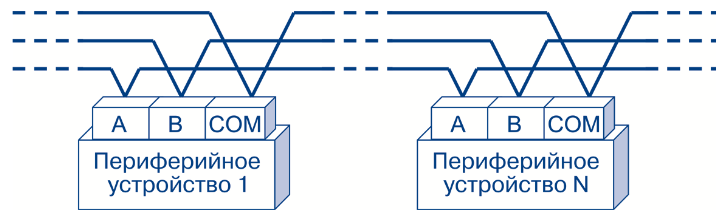
Как видно из рисунка, длинные ответвления (шлейфы) от магистрали до периферийных устройств не допускаются. Стандарт исходит из предположения, что длина шлейфа равна нулю, но на практике этого достичь невозможно (небольшой шлейф всегда имеется внутри любого периферийного устройства: от клеммы
до микросхемы приемопередатчика).
Качество витой пары оказывает большое влияние на дальность связи и максимальную скорость обмена в линии. Существуют специальные методики расчета допустимых скоростей обмена и максимальной длины линии связи, основанные на паспортных параметрах кабеля (волновое сопротивление, погонная емкость, активное сопротивление) и микросхем приемопередатчиков (допустимые искажения фронта сигнала). Но на относительно низких скоростях обмена (до 19200 бит/с) основное влияние на допустимую длину линии связи оказывает активное сопротивление кабеля. Опытным путем установлено, что на расстояниях до 600 м допускается использовать кабель с медной жилой сечением 0,35 мм (например, кабель КММ 2х0,35), на большие расстояния сечение кабеля необходимо пропорционально увеличить. Этот эмпирический результат хорошо согласуется с результатами, полученными расчетными методами.
Даже для скоростей обмена порядка 19200 бит/с кабель уже можно считать длинной линией, а любая длинная линия для исключения помех от отраженного сигнала должна быть согласована на концах. Для согласования используются резисторы
сопротивлением 120 Ом (точнее, с сопротивлением, равным волновому сопротивлению кабеля, но, как правило, используемые витые пары имеют волновое сопротивление около 120 Ом и точно подбирать резистор нет необходимости) и мощностью не менее 0,25 Вт – так называемый “терминатор”. Терминаторы устанавливаются на обоих концах линии связи, между контактами A и B витой пары.
В сетях RS-485 часто наблюдается состояние, когда все подключенные к сети устройства находятся в пассивном состоянии, т.е. в сети отсутствует передача и все приемопередатчики “слушают” сеть. В этом случае приемопередатчики не могут корректно распознать никакого устойчивого логического состояния в линии, а непосредственно после передачи все приемопередатчики распознают в линии состояние, соответствующее последнему переданному биту, что эквивалентно помехе в линии связи. На эту проблему не так часто обращают внимания, борясь с ее последствиями программными методами, но тем не менее решить ее аппаратно несложно. Достаточно с помощью специальных цепей смещения создать в линии потенциал, эквивалентный состоянию отсутствия передачи (так называемое состояние “MARK”: передатчик включен, но передача не ведется). Цепи смещения и терминатор реализованы в преобразователе I-7520. Для корректной работы цепей смещения необходимо наличие двух терминаторов в линии связи.
В сети RS-485 возможна конфликтная ситуация, когда 2 и более устройства начинают передачу одновременно. Это происходит в следующих случаях:
• в момент включения питания из-за переходных процессов устройства кратковременно могут находится в режиме передачи;
• одно или более из устройств неисправно;
• некорректно используется так называемый “мульти-мастерный” протокол, когда инициаторами обмена могут быть несколько устройств.
В первых двух случаях быстро устранить конфликт невозможно, что теоретически может привести к перегреву и выходу из строя приемопередатчиков RS-485. К счастью, такая ситуация предусмотрена стандартом и дополнительная защита приемопередатчика обычно не требуется. В последнем случае необходимо предусмотреть программное разделение канала между устройствами-инициаторами обмена, так как в любом случае для нормального функционирования линия связи может одновременно предоставляться только одному передатчику.
[ http://www.metodichka-contravt.ru/?id=3937]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > интерфейс RS-485
-
6 системный интерфейс малых компьютеров
системный интерфейс малых компьютеров
Служит для подключения быстродействующих периферийных подсистем и устройств, главным образом накопителей на магнитных и оптических дисках. Имеет 8-разрядную шину данных. Системный интерфейс регламентирован стандартом IEC 9316, который унифицирует уровни 0 и 1 для основных типов периферийных устройств, главным образом НМД, принтеров. В интерфейсе используется логическая адресация всех блоков данных и возможность считывания с устройств прямого доступа информации о числе имеющихся блоков. Максимальная скорость передачи данных составляет до 4 Мбайт/с при длине кабеля до 6 м при использовании обычных приемопередатчиков и до 25 м для дифференциальных приемопередатчиков. Архитектура интерфейса допускает несколько видов организации взаимодействия с использованием необязательного распределенного арбитража. Дополнительные возможности интерфейса: синхронная передача данных, использование для контроля четности, два варианта физической реализации. В стандарте регламентировано использование на физическом уровне интерфейса RS-485. Для интерфейса рекомендуется использовать двухрядный 50-контактный соединитель с шагом 2,54 мм и приемопередатчики с открытым коллектором на три состояния и выходным током 48 мА.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > системный интерфейс малых компьютеров
-
7 SCADA
SCADA
SCADA-система
диспетчерское управление и сбор данных
ПО, предназначенное для поддержки средств автоматизации и построения систем промышленной автоматизации.
[ http://www.morepc.ru/dict/]SCADA (аббр. от англ. supervisory control and data acquisition, диспетчерское управление и сбор данных) — программный пакет, предназначенный для разработки или обеспечения работы в реальном времени систем сбора, обработки, отображения и архивирования информации об объекте мониторинга или управления. SCADA может являться частью АСУ ТП, АСКУЭ, системы экологического мониторинга, научного эксперимента, автоматизации здания и т. д. SCADA-системы используются во всех отраслях хозяйства, где требуется обеспечивать операторский контроль за технологическими процессами в реальном времени. Данное программное обеспечение устанавливается на компьютеры и, для связи с объектом, использует драйверы ввода-вывода или OPC/DDE серверы. Программный код может быть как написан на языке программирования (например на C++), так и сгенерирован в среде проектирования.
Иногда SCADA-системы комплектуются дополнительным ПО для программирования промышленных контроллеров. Такие SCADA-системы называются интегрированными и к ним добавляют термин SoftLogic.
Термин «SCADA» имеет двоякое толкование. Наиболее широко распространено понимание SCADA как приложения[2], то есть программного комплекса, обеспечивающего выполнение указанных функций, а также инструментальных средств для разработки этого программного обеспечения. Однако, часто под SCADA-системой подразумевают программно-аппаратный комплекс. Подобное понимание термина SCADA более характерно для раздела телеметрия.
Значение термина SCADA претерпело изменения вместе с развитием технологий автоматизации и управления технологическими процессами. В 80-е годы под SCADA-системами чаще понимали программно-аппаратные комплексы сбора данных реального времени. С 90-х годов термин SCADA больше используется для обозначения только программной части человеко-машинного интерфейса АСУ ТП.Основные задачи, решаемые SCADA-системами
SCADA-системы решают следующие задачи:- Обмен данными с «устройствами связи с объектом», то есть с промышленными контроллерами и платами ввода/вывода) в реальном времени через драйверы.
- Обработка информации в реальном времени.
- Логическое управление.
- Отображение информации на экране монитора в удобной и понятной для человека форме.
- Ведение базы данных реального времени с технологической информацией.
- Аварийная сигнализация и управление тревожными сообщениями.
- Подготовка и генерирование отчетов о ходе технологического процесса.
- Осуществление сетевого взаимодействия между SCADA ПК.
- Обеспечение связи с внешними приложениями (СУБД, электронные таблицы, текстовые процессоры и т. д.). В системе управления предприятием такими приложениями чаще всего являются приложения, относимые к уровню MES.
SCADA-системы позволяют разрабатывать АСУ ТП в клиент-серверной или в распределённой архитектуре.
Основные компоненты SCADA
SCADA—система обычно содержит следующие подсистемы:- Драйверы или серверы ввода-вывода — программы, обеспечивающие связь SCADA с промышленными контроллерами, счётчиками, АЦП и другими устройствами ввода-вывода информации.
- Система реального времени — программа, обеспечивающая обработку данных в пределах заданного временного цикла с учетом приоритетов.
- Человеко-машинный интерфейс (HMI, англ. Human Machine Interface) — инструмент, который представляет данные о ходе процесса человеку оператору, что позволяет оператору контролировать процесс и управлять им. Программа-редактор для разработки человеко-машинного интерфейса.
- Система логического управления — программа, обеспечивающая исполнение пользовательских программ (скриптов) логического управления в SCADA-системе. Набор редакторов для их разработки.
- База данных реального времени — программа, обеспечивающая сохранение истории процесса в режиме реального времени.
- Система управления тревогами — программа, обеспечивающая автоматический контроль технологических событий, отнесение их к категории нормальных, предупреждающих или аварийных, а также обработку событий оператором или компьютером.
- Генератор отчетов — программа, обеспечивающая создание пользовательских отчетов о технологических событиях. Набор редакторов для их разработки.
- Внешние интерфейсы — стандартные интерфейсы обмена данными между SCADA и другими приложениями. Обычно OPC, DDE, ODBC, DLL и т. д.
Концепции систем
Термин SCADA обычно относится к централизованным системам контроля и управления всей системой, или комплексами систем, осуществляемого с участием человека. Большинство управляющих воздействий выполняется автоматически RTU или ПЛК. Непосредственное управление процессом обычно обеспечивается RTU или PLC, а SCADA управляет режимами работы. Например, PLC может управлять потоком охлаждающей воды внутри части производственного процесса, а SCADA система может позволить операторам изменять уста для потока, менять маршруты движения жидкости, заполнять те или иные ёмкости, а также следить за тревожными сообщениями (алармами), такими как — потеря потока и высокая температура, которые должны быть отображены, записаны, и на которые оператор должен своевременно реагировать. Цикл управления с обратной связью проходит через RTU или ПЛК, в то время как SCADA система контролирует полное выполнение цикла.
Сбор данных начинается в RTU или на уровне PLC и включает — показания измерительного прибора. Далее данные собираются и форматируются таким способом, чтобы оператор диспетчерской, используя HMI мог принять контролирующие решения — корректировать или прервать стандартное управление средствами RTU/ПЛК. Данные могут также быть записаны в архив для построения трендов и другой аналитической обработки накопленных данных.[ http://ru.wikipedia.org/wiki/SCADA]
CitectSCADA
полнофункциональная система мониторинга, управления и сбора данных (SCADA – Supervisory Control And Data Acquisition)
ТЕХНИЧЕСКАЯ ИНФОРМАЦИЯ:CitectSCADA построена на базе мультизадачного ядра реального времени, что обеспечивает производительность сбора до 5 000 значений в секунду при работе в сетевом режиме с несколькими станциями. Модульная клиент-серверная архитектура позволяет одинаково эффективно применять CitectSCADA как в малых проектах, с использованием только одного АРМ, так и в больших, с распределением задач на несколько компьютеров.
В отличие от других SCADA-систем среда разработки CitectSCADA поставляется бесплатно. Оплачивается только среда исполнения (runtime). Это позволяет пользователю разработать и протестировать пробный проект, не вкладывая средств на начальном этапе.
Схема лицензирования CitectSCADA основана на учете числа одновременно задействованных компьютеров в проекте, а не общего числа компьютеров, на которых установлена CitectSCADA.
CitectSCADA лицензируется на заданное количество точек (дискретных или аналоговых переменных). При этом учитываются только внешние переменные, считываемые из устройств ввода/вывода, а внутренние переменные, находящиеся в памяти или на диске, бесплатны и не входят в количество лицензируемых точек. Градация количества лицензируемых точек в CitectSCADA более равномерна, чем в других системах: 75, 150, 500, 1 500, 5 000, 15 000, 50 000 и неограниченное количество.
В CitectSCADA резервирование является встроенным и легко конфигурируемым. Резервирование позволяет защищать все зоны потенциальных отказов как функциональных модулей (серверов и клиентов), так и сетевых соединений между узлами и устройствами ввода/вывода.
CitectSCADA имеет встроенный язык программирования CiCode, а также поддержку VBA.
CitectSCADA работает как 32-разрядное приложение Windows 9X/NT/2000/XP/2003. Сбор данных, формирование алармов и построение трендов происходит одновременно с редактированием и компиляцией.
[ http://www.rtsoft.ru/catalog/soft/scada/detail/343/]
Словесный портрет современной управляющей системы типа SCADA
-
Масштабируемая
- Наращивание системы без её переконфигурирования
- Масштабы проекта не ограничены
- До 255 одновременно подключённых клиентов
- Поддержка локальных и глобальных сетей
- Возможность интеграции с веб-приложениями без конфигурирования системы
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка кластерных конфигураций
- Возможность перезапуска отдельных процессов, относящихся к разным компонентам
-
Гибкая
- Полноценная архитектура «клиент-сервер»
- Возможность масштабирования серверов/серверных массивов алармов, трендов и отчётов
- Поддержка централизованного хранения файлов проекта для удобства обслуживания, а также распределённого хранения и комбинированного варианта
- Внесение изменений на отдельных локациях
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка устоявшихся и новых стандартов
-
Надёжная
- Встроенная поддержка режима ожидания
- Резервирование файловых серверов
- Резервирование сетевых коммуникаций
- Резервирование серверов алармов
- Резервирование серверов трендов
- Резервирование серверов отчётов
- Многоуровневое резервирование ввода-вывода
- Автоматическая замена серверов
- Автоматическая синхронизация историй трендов
- Автоматическая синхронизация таблиц алармов
- Автоматическая синхронизация времени
- Защитные функции
- Автоматический перезапуск в случае сбоя системы
- Высокопроизводительная
- Безопасная
-
Коммуникационные технологии
- Поддержка открытых коммуникационных стандартов
- Поддержка каждым сервером ввода-вывода многих протоколов
- Драйверы протоколов RS-232, RS-422, RS-485, TCP/IP
- Время установки драйверов в пределах 60 секунд
- До 255 одновременно подключённых клиентов
- До 4096 устройств ввода-вывода на одну систему
- Поддержка внешнего подключения для удалённых устройств
- Средства разработки драйверов для специализированных протоколов
- Поддержка стандарта OPC Server DA2.0
- Интегрированный веб-сервис XML
- Доступ
- Неограниченное число меток
- Длина имени метки до 80 символов
- Поддержка меток качества и времени для соответствующих драйверов
- Единая база данных для контроллеров ПЛК и системы SCADA
- Двунаправленная синхронизация со средой разработки для ПЛК
- Статическая синхронизация для разработки в автономном режиме
- - Автоматические импорт и синхронизация
- Импорт из ПЛК разных типов
- Добавление пользовательских схем импорта
-
Разработка
- Неограниченное число экранов
- 24-битные цвета
- Быстрый выбор цветов по названиям
- Поддержка прозрачных цветов
- Продвинутая анимация без дополнительного программирования
- Анимация символов на базе тегов
- До 32000 анимированных изображений на страницу
- Неограниченное число мигающих цветов
- Мультиязычность
- Инструменты типа 3D Pipe
- Трёхмерные эффекты (поднятие, опускание, выдавливание)
-
Импорт графики
- Растровые изображения Windows (BMP, RLE, DIB)
- Формат AutoCAD (DXF)
- Формат Encapsulated Postscript (EPS)
- Формат Fax Image (FAX)
- Формат Ventura (IMG)
- Формат JPEG (JPG, JIF, JFF, JFE)
- Формат Photo CD (PCD)
- Формат PaintBrush (PCX)
- Формат Portable Network Graphics (PNG)
- Формат Targa (TGA)
- Формат Tagged Image Format (TIFF)
- Формат Windows Meta File (WMF)
- Формат Word Perfect Graphics (WPG)
- Неограниченное число отмен действий
- Кнопки в стиле Windows XP со свойствами динамического перемещения
- Шаблоны
- Символы
- Более 800 символов в комплекте поставки
-
Объектное конфигурирование
- Неограниченное число объектов типа «джинн» (Genie) и «суперджинн» (Super Genie)
- Пользовательские «джинны» позволяют отображать на экране пользовательское оборудование
- Пользовательские «суперджины» позволяют работать с разными устройствами через один интерфейс
- Объекты типа «джинн» и «суперджинн» способны воспринимать изменения в тегах устройств без дополнительного программирования
-
Работа
- Разрешения до 4096 x 4096
- Изменение размеров изображений (изотропное и анизотропное)
- Поддержка вывода на несколько мониторов
- Настройка скорости обновления страниц (минимум 10 мс)
- Информирование о потере связи
- Переключение языков в ходе работы
- Поддержка одно- и двухбайтовых наборов символов
-
Безопасность
- Уровень безопасности влияет на:
- Видимость объектов
- Доступ к графическим дисплеям
- Подтверждение алармов
- Создание отчётов
- Системные утилиты
-
Управление
- Сенсорные команды
- Мышь
- -Клавиатурное управление системой, страницами и анимацией
- Вертикальные и горизонтальные ползунки
- Замена БД
-
Анализ процессов
- Объединение алармов с трендами
- 32 и более перьев
- 4 и более оконных секций
- 2 и более курсоров
- Наложение перьев
- Информация о качестве данных
- Аналоговые и цифровые перья
- Информация о подтверждении алармов
- Описание алармов (аналоговых и мультицифровых)
- Комментарии к алармам
- Поддержка перехода на летнее и зимнее время
- Сохранение просмотров в процессе работы
- Хранение просмотров в удалённых локациях
- Отображение различных временных периодов на том же дисплее
- Настраиваемое и расширяемое управление
-
Алармы
- Неограниченное число алармов
- Централизованная обработка алармов
- Алармы могут быть следующих типов:
- Цифровые
- Аналоговые
- Временные метки
- Высокоуровневые выражения
- Мультицифровые
- Цифровые с временными метками
- Аналоговые с временными метками
- Изменение языка для всех алармов в процессе работы
- Подтверждение приёма в сети без дополнительного конфигурирования
- Отключение сети без дополнительного конфигурирования
- Категории, зоны и приоритеты алармов
- Задержки алармов
- Назначение временных меток с разрешением в 1 мс
- Различные данные в алармах
- Индивидуальные и групповые подтверждения
- Подтверждения на основе категорий и приоритетов
- Подтверждения отображаются графически, в списке алармов или через специализированный код:
- Сортировка алармов
- Фильтрация алармов
- Пользовательские поля алармов
-
Тренды
- Неограниченное число трендов
- До 16000 трендов на страницу
- Отображение любого тренда из истории менее чем за 1 секунду
- Файлов трендов регулируемых размеров
- Просмотр архивных трендов параллельно с актуальными в процессе работы системы
- Выбор с разрешением 1 мс
- Сравнение трендов
- Быстрый выбор трендов по тегам
- Сохранение по событию или периодическое сохранение
Статистический контроль ( SPC)
- Таблицы индексов Cp и CpK
- Контрольные карты X, R и S
- Диаграммы Парето
- Настраиваемые размеры и границы подгрупп
- Типы алармов: Above UCL, Below LCL, Outside CL, Down Trend, Up Trend, Erratic, Gradual, Down, Gradual Up, Mixture, Outside WL, Freak, Stratification и высокоуровневые выражения
- Редактор сгенерированных отчётов, редактирование по модели WYSIWYN, отчёты в формате Rich Text
- Запуск внешними событиями, по расписанию, через высокоуровневые выражения и по команде оператора
- Вывод на принтер, в файл, по электронной почте, на экран, в формат HTML
- Разработка проекта
- Масштабы проекта не ограничены
- Возможность разбиения на несколько проектов
- Удобная стандартизация проектов
- Удобное обслуживание проектов
- Встроенное средство настройки компьютеров позволяет конфигурировать каждый подключённый к сети ПК по отдельности
- Истинная вытесняющая многозадачность
- До 512 параллельных потоков
- Доступно более 600 функций SCADA
- Библиотеки для пользовательских функций
- До 2700 пользовательских функций
- Локальные, модульные и глобальные переменные
- Дополнительное программное обеспечение для создания собственных функций не требуется
- Прямой доступ к данным трендов, отчётов и алармов
- Подсвечивание синтаксиса
- Система онлайн-подсказок
- Всплывающие подсказки
- При редактировании доступны:
- Контрольные точки
- Просмотр переменных
- Мониторинг нитей
- Выделение кода цветом
- Окно контрольных точек
- Пошаговый режим выполнения
- Выделение текущей строки
- Удалённая отладка
- Автоматическая отладка в случае ошибок
- Сервер и клиент OPC
- Интерфейс ODBC
- Интерфейс OLE-DB
- Интерфейс CTAPI
- Интерфейс DLL
- Интерфейс MAPI (MAIL)
- Протоколы TCP/IP
- Последовательный интерфейс
[ http://www.rtsoft-training.ru/?p=600074]
Тематики
Синонимы
- SCADA-система
- диспетчерское управление и сбор данных
- система диспетчерского управления и сбора данных
- система мониторинга, управления и сбора данных
EN
Русско-английский словарь нормативно-технической терминологии > SCADA
-
8 автосогласование
автосогласование
Процедура автоматического (без вмешательства оператора или системного администратора) обмена служебной информацией, которая позволяет осуществить настройку интерфейса и выбрать максимально возможную скорость передачи, доступную обоим участникам информационного обмена. В сети Ethernet процедура автосогласования выполняется за время, не превышающее нескольких миллисекунд (стандарт 802.3).
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
EN
Русско-английский словарь нормативно-технической терминологии > автосогласование
-
9 интеллектуальный периферийный интерфейс
интеллектуальный периферийный интерфейс
Предназначен для ЭВМ высокой и средней производительности с целью подключения к центральным и периферийным процессорам различных быстродействующих устройств, главным образом НМД, НОД, НМЛ, печатающих устройств, средств телеобработки данных и т. д. Интерфейс обеспечивает при 16-разрядном тракте данных скорость и производительность 10 Мбайт/с при удалении взаимодействующих устройств от 5 до 125 м. Ведутся работы по повышению производительности до 50 Мбайт/с и выше. Реализация интерфейса: режим «задатчик – исполнитель», кабель содержит 24 сигнальные линии и использует цепочечную схему подключения 8 исполнителей, каждый из которых обслуживает 16 устройств, передача может осуществляться по двум однонаправленным или по магистральным 16-разрядным шинам, в том числе и синхронная передача в потоковом режиме.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > интеллектуальный периферийный интерфейс
-
10 интерфейс RS-422A
интерфейс RS-422A
Разработан EIA и адаптирован CCITT в виде спецификаций V.11 и Х.27; предназначен для последовательной передачи данных по симметричным цепям и обеспечивает скорость передачи до 100 Кбит/с при длине 1200 м и до 10 Мбит/с при длине 12... 15 м. Уровни напряжения, используемые в интерфейсе: логический нуль 2...6 В, логическая единица -6... -2 В. Соединитель интерфейса – типа DB-37. Интерфейс широко применяется для сопряжения ЭВМ между собой и внешним оборудованием повышенного быстродействия, например НГМД.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > интерфейс RS-422A
-
11 интерфейс RS-423
интерфейс RS-423
Разработан EIA и адаптирован CCITT в виде спецификаций V.10 и Х.26; предназначен для последовательной передачи данных по несимметричным цепям и обеспечивает скорость передачи до 3 Кбит/с при длине 1200 м и до 300 Кбит/с при длине 12... 15 м. Уровни напряжения, используемые в интерфейсе: логический нуль 4..6 В, логическая единица -6...-4 В. Соединитель интерфейса типа DB-37. Интерфейс является более эффективным, чем RS-232C при подключении к ЭВМ периферийных устройств. Широко используется в ПЭВМ в Великобритании.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > интерфейс RS-423
-
12 интерфейс ПС
интерфейс ПС
Является интерфейсом первого уровня и служит для соединения совместимого периферийного оборудования внутри вычислительного комплекса или промышленного аппарата, в том числе бытового назначения с управлением от микро- ЭВМ или ПЭВМ. Общая длина интерфейса 10 м, скорость передачи данных от 10 Кбайт/с до 1 Мбайт/с. Интерфейс использует: 2 линии, однобитовый синхронный способ обмена данными, децентрализованное управление на основе последовательного сравнения приоритетов, один режим передачи, формат рамки сообщения – 11 бит, блоки данных произвольной длины, первичную адресацию –7 бит, число подключенных абонентов – 30. Интерфейс широко используется фирмой DEC для подключения к системной шине типа Q-bus различных периферийных и функциональных устройств. Контроллеры ПС встроены в специальные БИС и однокристальные микроЭВМ типа i8048, 18051 с включением программных средств поддержки работы и разработки специализованных устройств широкой номенклатуры (АЦП, ЦАП, индикаторы, клавиатуры и т. д.).
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > интерфейс ПС
-
13 интерфейс последовательной передачи данных
интерфейс последовательной передачи данных
Интерфейс, в котором используются несимметричные относительно земляной шины сигналы: 5-15 В - логическая “1” и - (5-15) В - логический нуль. Уровни сигнала данных и управления - биполярные. Существуют два типа разъемов для RS-232: 9- и 25-штырьковые. Применяются несколько версий этого интерфейса. Так, для RS-232 D/RS-232 диапазон напряжения расширен до 25 В. Интерфейс был разработан для передачи данных с максимальной скоростью 20 кбит/с на расстояние до 15 м. Однако, если расстояние меньше 15 м, то скорость обмена может быть увеличена до 115,2 кбит/с.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
EN
Русско-английский словарь нормативно-технической терминологии > интерфейс последовательной передачи данных
-
14 последовательная магистраль управления
последовательная магистраль управления
Bitbus
Разработана фирмой Intel для построения иерархических недорогих систем управления на основе ЭВМ различных классов. В одном сегменте интерфейса допускается до 200 исполнителей. Повторители используются для увеличения длины магистрали или числа узлов внутри системы. Магистраль может работать в одном из двух режимов: синхронном или с самосинхронизацией. В синхронном режиме обеспечивается длина магистрали до 30 м, подключение не более 28 узлов, скорость передачи от 500 Кбит/с до 2,4 Мбит/с и используются две дифференциальные сигнальные пары (данных и синхронизации данных). Режим самосинхронизации дает возможность работать на расстоянии до 300 м при скорости 375 Кбит/с и до 1200 м при скорости 62,5 Кбит/с. В каждом сегменте может быть не более 28 узлов, при использовании повторителей число узлов в этом режиме может быть до 250 на расстоянии несколько тысяч метров. В этом режиме используются две дифференциальные пары (данных и управления приемопередатчиком повторителей). Физическая реализация передатчика магистрали и сигналов магистрали соответствует требованиям стандарта RS-485.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > последовательная магистраль управления
-
15 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
16 управление электропитанием
управление электропитанием
-
[Интент]
Управление электропитанием ЦОД
Автор: Жилкина Наталья
Опубликовано 23 апреля 2009 года
Источники бесперебойного питания, функционирующие в ЦОД, составляют важный элемент общей системы его энергообеспечения. Вписываясь в контур управления ЦОД, система мониторинга и управления ИБП становится ядром для реализации эксплуатационных функций.
Три задачи
Системы мониторинга, диагностики и управления питанием нагрузки решают три основные задачи: позволяют ИБП выполнять свои функции, оповещать персонал о происходящих с ними событиях и посылать команды для автоматического завершения работы защищаемого устройства.
Мониторинг параметров ИБП предполагает отображение и протоколирование состояния устройства и всех событий, связанных с его изменением. Диагностика реализуется функциями самотестирования системы. Управляющие же функции предполагают активное вмешательство в логику работы устройства.Многие специалисты этого рынка, отмечая важность процедуры мониторинга, считают, что управление должно быть сведено к минимуму. «Функция управления ИБП тоже нужна, но скорее факультативно, — говорит Сергей Ермаков, технический директор компании Inelt и эксперт в области систем Chloride. — Я глубоко убежден, что решения об активном управляющем вмешательстве в работу систем защиты электропитания ответственной нагрузки должен принимать человек, а не автоматизированная система. Завершение работы современных мощных серверов, на которых функционируют ответственные приложения, — это, как правило, весьма длительный процесс. ИБП зачастую не способны обеспечивать необходимое для него время, не говоря уж о времени запуска какого-то сервиса». Функция же мониторинга позволяет предотвратить наступление нежелательного события — либо, если таковое произошло, проанализировать его причины, опираясь не на слова, а на запротоколированные данные, хранящиеся в памяти адаптера или файлах на рабочей станции мониторинга.
Эту точку зрения поддерживает и Алексей Сарыгин, технический директор компании Radius Group: «Дистанционное управление мощных ИБП — это вопрос, к которому надо подходить чрезвычайно аккуратно. Если функции дистанционного мониторинга и диспетчеризации необходимы, то практика предоставления доступа персоналу к функциям дистанционного управления представляется радикально неверной. Доступность модулей управления извне потенциально несет в себе риск нарушения безопасности и категорически снижает надежность системы. Если существует физическая возможность дистанционно воздействовать на ИБП, на его параметры, отключение, снятие нагрузки, закрытие выходных тиристорных ключей или блокирование цепи байпаса, то это чревато потерей питания всего ЦОД».
Практически на всех трехфазных ИБП предусмотрена кнопка E.P.O. (Emergency Power Off), дублер которой может быть выведен на пульт управления диспетчерской. Она обеспечивает аварийное дистанционное отключение блоков ИБП при наступлении аварийных событий. Это, пожалуй, единственная возможность обесточить нагрузку, питаемую от трехфазного аппарата, но реализуется она в исключительных случаях.
Что же касается диагностики электропитания, то, как отмечает Юрий Копылов, технический директор московского офиса корпорации Eaton, в последнее время характерной тенденцией в управляющем программном обеспечении стал отказ от предоставления функций удаленного тестирования батарей даже системному администратору.
— Адекватно сравнивать состояние батарей необходимо под нагрузкой, — говорит он, — сам тест запускать не чаще чем раз в два дня, а разряжать батареи надо при одном и том же токе и уровне нагрузки. К тому же процесс заряда — довольно долгий. Все это не идет батареям на пользу.Средства мониторинга
Производители ИБП предоставляют, как правило, сразу несколько средств мониторинга и в некоторых случаях даже управления ИБП — все они основаны на трех основных методах.
В первом случае устройство подключается напрямую через интерфейс RS-232 (Com-порт) к консоли администратора. Дальность такого подключения не превышает 15 метров, но может быть увеличена с помощью конверторов RS-232/485 и RS-485/232 на концах провода, связывающего ИБП с консолью администратора. Такой способ обеспечивает низкую скорость обмена информацией и пригоден лишь для топологии «точка — точка».
Второй способ предполагает использование SNMP-адаптера — встроенной или внешней интерфейсной карты, позволяющей из любой точки локальной сети получить информацию об основных параметрах ИБП. В принципе, для доступа к ИБП через SNMP достаточно веб-браузера. Однако для большего комфорта производители оснащают свои системы более развитым графическим интерфейсом, обеспечивающим функции мониторинга и корректного завершения работы. На базе SNMP-протокола функционируют все основные системы мониторинга и управления ИБП, поставляемые штатно или опционально вместе с ИБП.
Стандартные SNMP-адаптеры поддерживают подключение нескольких аналоговых или пороговых устройств — датчик температуры, движения, открытия двери и проч. Интеграция таких устройств в общую систему мониторинга крупного объекта (например, дата-центра) позволяет охватить огромное количество точек наблюдения и отразить эту информацию на экране диспетчера.
Большое удобство предоставляет метод эксплуатационного удаленного контроля T.SERVICE, позволяющий отследить работу оборудования посредством телефонной линии (через модем GSM) или через Интернет (с помощью интерфейса Net Vision путем рассылки e-mail на электронный адрес потребителя). T.SERVICE обеспечивает диагностирование оборудования в режиме реального времени в течение 24 часов в сутки 365 дней в году. ИБП автоматически отправляет в центр технического обслуживания регулярные отчеты или отчеты при обнаружении неисправности. В зависимости от контролируемых параметров могут отправляться уведомления о неправильной эксплуатации (с пользователем связывается опытный специалист и рекомендует выполнить простые операции для предотвращения ухудшения рабочих характеристик оборудования) или о наличии отказа (пользователь информируется о состоянии устройства, а на место установки немедленно отправляется технический специалист).Профессиональное мнение
Наталья Маркина, коммерческий директор представительства компании SOCOMEC
Управляющее ПО фирмы SOCOMEC легко интегрируется в общий контур управления инженерной инфраструктурой ЦОД посредством разнообразных интерфейсов передачи данных ИБП. Установленное в аппаратной или ЦОД оборудование SOCOMEC может дистанционно обмениваться информацией о своих рабочих параметрах с системами централизованного управления и компьютерными сетями посредством сухих контактов, последовательных портов RS232, RS422, RS485, а также через интерфейс MODBUS TCP и GSS.
Интерфейс GSS предназначен для коммуникации с генераторными установками и включает в себя 4 входа (внешние контакты) и 1 выход (60 В). Это позволяет программировать особые процедуры управления, Global Supply System, которые обеспечивают полную совместимость ИБП с генераторными установками.
У компании Socomec имеется широкий выбор интерфейсов и коммуникационного программного обеспечения для установки диалога между ИБП и удаленными системами мониторинга промышленного и компьютерного оборудования. Такие опции связи, как панель дистанционного управления, интерфейс ADC (реконфигурируемые сухие контакты), обеспечивающий ввод и вывод данных при помощи сигналов сухих контактов, интерфейсы последовательной передачи данных RS232, RS422, RS485 по протоколам JBUS/MODBUS, PROFIBUS или DEVICENET, MODBUS TCP (JBUS/MODBUS-туннелирование), интерфейс NET VISION для локальной сети Ethernet, программное обеспечение TOP VISION для выполнения мониторинга с помощью рабочей станции Windows XP PRO — все это позволяет контролировать работу ИБП удобным для пользователя способом.
Весь контроль управления ИБП, ДГУ, контроль окружающей среды сводится в единый диспетчерский пункт посредством протоколов JBUS/MODBUS.
Индустриальный подход
Третий метод основан на использовании высокоскоростной индустриальной интерфейсной шины: CANBus, JBus, MODBus, PROFIBus и проч. Некоторые модели ИБП поддерживают разновидность универсального smart-слота для установки как карточек SNMP, так и интерфейсной шины. Система мониторинга на базе индустриальной шины может быть интегрирована в уже существующую промышленную SCADA-систему контроля и получения данных либо создана как заказное решение на базе многофункциональных стандартных контроллеров с выходом на шину. Промышленная шина через шлюзы передает информацию на удаленный диспетчерский пункт или в систему управления зданием (Building Management System, BMS). В эту систему могут быть интегрированы и контроллеры, управляющие ИБП.
Универсальные SCADA-системы поддерживают датчики и контроллеры широкого перечня производителей, но они недешевы и к тому же неудобны для внесения изменений. Но если подобная система уже функционирует на объекте, то интеграция в нее дополнительных ИБП не представляет труда.
Сергей Ермаков, технический директор компании Inelt, считает, что применение универсальных систем управления на базе промышленных контроллеров нецелесообразно, если используется для мониторинга только ИБП и ДГУ. Один из практичных подходов — создание заказной системы, с удобной для заказчика графической оболочкой и необходимым уровнем детализации — от карты местности до поэтажного плана и погружения в мнемосхему компонентов ИБП.
— ИБП может передавать одинаковое количество информации о своем состоянии и по прямому соединению, и по SNMP, и по Bus-шине, — говорит Сергей Ермаков. — Применение того или иного метода зависит от конкретной задачи и бюджета. Создав первоначально систему UPS Look для мониторинга ИБП, мы интегрировали в нее систему мониторинга ДГУ на основе SNMP-протокола, после чего по желанию одного из заказчиков конвертировали эту систему на промышленную шину Jbus. Новое ПО JSLook для мониторинга неограниченного количества ИБП и ДГУ по протоколу JBus является полнофункциональным средством мониторинга всей системы электроснабжения объекта.Профессиональное мение
Денис Андреев, руководитель департамента ИБП компании Landata
Практически все ИБП Eaton позволяют использовать коммуникационную Web-SNMP плату Connect UPS и датчик EMP (Environmental Monitoring Probe). Такой комплект позволяет в числе прочего осуществлять мониторинг температуры, влажности и состояния пары «сухих» контактов, к которым можно подключить внешние датчики.
Решение Eaton Environmental Rack Monitor представляет собой аналог такой связки, но с существенно более широким функционалом. Внешне эта система мониторинга температуры, влажности и состояния «сухих» контактов выполнена в виде компактного устройства, которое занимает минимум места в шкафу или в помещении.
Благодаря наличию у Eaton Environmental Rack Monitor (ERM) двух выходов датчики температуры или влажности можно разместить в разных точках стойки или помещения. Поскольку каждый из двух датчиков имеет еще по два сухих контакта, с них дополнительно можно принимать сигналы от датчиков задымления, утечки и проч. В центре обработки данных такая недорогая система ERM, состоящая из неограниченного количества датчиков, может транслировать информацию по протоколу SNMP в HTML-страницу и позволяет, не приобретая специального ПО, получить сводную таблицу измеряемых величин через веб-браузер.
Проблему дефицита пространства и высокой плотности размещения оборудования в серверных и ЦОД решают системы распределения питания линейки Eaton eDPU, которые можно установить как внутри стойки, так и на группу стоек.
Все модели этой линейки представляют четыре семейства: системы базового исполнения, системы с индикацией потребляемого тока, с мониторингом (локальным и удаленным, по сети) и управляемые, с возможностью мониторинга и управления электропитанием вплоть до каждой розетки. С помощью этих устройств можно компактным способом увеличить количество розеток в одной стойке, обеспечить контроль уровня тока и напряжения критичной нагрузки.
Контроль уровня потребляемой мощности может осуществляться с высокой степенью детализации, вплоть до сервера, подключенного к конкретной розетке. Это позволяет выяснить, какой сервер перегревается, где вышел из строя вентилятор, блок питания и т. д. Программным образом можно запустить сервер, подключенный к розетке ePDU. Интеграция системы контроля ePDU в платформу управления Eaton находится в процессе реализации.Требование объекта
Как поясняет Олег Письменский, в критичных объектах, таких как ЦОД, можно условно выделить две области контроля и управления. Первая, Grey Space, — это собственно здание и соответствующая система его энергообеспечения и энергораспределения. Вторая, White Space, — непосредственно машинный зал с его системами.
Выбор системы управления энергообеспечением ЦОД определяется типом объекта, требуемым функционалом системы управления и отведенным на эти цели бюджетом. В большинстве случаев кратковременная задержка между наступлением события и получением информации о нем системой мониторинга по SNMP-протоколу допустима. Тем не менее в целом ряде случаев, если характеристики объекта подразумевают непрерывность его функционирования, объект является комплексным и содержит большое количество элементов, требующих контроля и управления в реальном времени, ни одна стандартная система SNMP-мониторинга не обеспечит требуемого функционала. Для таких объектов применяют системы управления real-time, построенные на базе программно-аппаратных комплексов сбора данных, в том числе c функциями Softlogic.
Системы диспетчеризации и управления крупными объектами реализуются SCADA-системами, широкий перечень которых сегодня присутствует на рынке; представлены они и в портфеле решений Schneider Electric. Тип SCADA-системы зависит от класса и размера объекта, от количества его элементов, требующих контроля и управления, от уровня надежности. Частный вид реализации SCADA — это BMS-система(Building Management System).
«Дата-центры с объемом потребляемой мощности до 1,5 МВт и уровнем надежности Tier I, II и, с оговорками, даже Tier III, могут обслуживаться без дополнительной SCADA-системы, — говорит Олег Письменский. — На таких объектах целесообразно применять ISX Central — программно-аппаратный комплекс, использующий SNMP. Если же категория и мощность однозначно предполагают непрерывность управления, в таких случаях оправданна комбинация SNMP- и SCADA-системы. Например, для машинного зала (White Space) применяется ISX Central с возможными расширениями как Change & Capacity Manager, в комбинации со SCADA-системой, управляющей непосредственно объектом (Grey Space)».Профессиональное мнение
Олег Письменский, директор департамента консалтинга APC by Schneider Electric в России и СНГ
Подход APC by Schneider Electric к реализации полномасштабного полноуправляемого и надежного ЦОД изначально был основан на базисных принципах управления ИТ-инфраструктурой в рамках концепции ITIL/ITSM. И история развития системы управления инфраструктурой ЦОД ISX Manager, которая затем интегрировалась с программно-аппаратным комплексом NetBotz и трансформировалась в портал диспетчеризации ISX Central, — лучшее тому доказательство.
Первым итогом поэтапного приближения к намеченной цели стало наращивание функций контроля параметров энергообеспечения. Затем в этот контур подключилась система управления кондиционированием, система контроля параметров окружающей среды. Очередным шагом стало измерение скорости воздуха, влажности, пыли, радиации, интеграция сигналов от камер аудио- и видеонаблюдения, системы управления блоками розеток, завершения работы сервера и т. д.
Эта система не может и не должна отвечать абсолютно всем принципам ITSM, потому что не все они касаются существа поставленной задачи. Но как только в отношении политик и некоторых тактик управления емкостью и изменениями в ЦОД потребовался соответствующий инструментарий — это нашло отражение в расширении функционала ISX Central, который в настоящее время реализуют ПО APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager. С появлением этих двух решений, интегрированных в систему управления реальным объектом, АРС предоставляет возможность службе эксплуатации оптимально планировать изменения количественного и качественного состава оборудования машинного зала — как на ежедневном оперативном уровне, так и на уровне стратегических задач массовых будущих изменений.
Решение APC by Schneider Electric Capacity обеспечивает автоматизированную обработку информации о свободных ресурсах инженерной инфраструктуры, реальном потреблении мощности и пространстве в стойках. Обращаясь к серверу ISX Central, системы APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager оценивают степень загрузки ИБП и систем охлаждения InRow, прогнозируют воздействие предполагаемых изменений и предлагают оптимальное место для установки нового или перестановки имеющегося оборудования. Новые решения позволяют, выявив последствия от предполагаемых изменений, правильно спланировать замену оборудования в ЦОД.
Переход от частного к общему может потребовать интеграции ISX Central в такие, например, порталы управления, как Tivoli или Open View. Возможны и другие сценарии, когда ISX Central вписывается и в SCADA–систему. В этом случае ISX Central выполняет роль диспетчерской настройки, функционал которой распространяется на серверную комнату, но не охватывает целиком периметр объекта.Случай из практики
Решение задачи управления энергообеспечением ЦОД иногда вступает в противоречие с правилами устройств электроустановок (ПУЭ). Может оказаться, что в соответствии с ПУЭ в ряде случаев (например, при компоновке щитов ВРУ) необходимо обеспечить механические блокировки. Однако далеко не всегда это удается сделать. Поэтому такая задача часто требует нетривиального решения.
— В одном из проектов, — вспоминает Алексей Сарыгин, — где система управления включала большое количество точек со взаимными пересечениями блокировок, требовалось не допустить снижения общей надежности системы. В этом случае мы пришли к осознанному компромиссу, сделали систему полуавтоматической. Там, где это было возможно, присутствовали механические блокировки, за пультом дежурной смены были оставлены функции мониторинга и анализа, куда сводились все данные о положении всех автоматов. Но исполнительную часть вывели на отдельную панель управления уже внутри ВРУ, где были расположены подробные пользовательские инструкции по оперативному переключению. Таким образом мы избавились от излишней автоматизации, но постарались минимизировать потери в надежности и защититься от ошибок персонала.
[ http://www.computerra.ru/cio/old/products/infrastructure/421312/]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > управление электропитанием
17 ускоренный графический порт
ускоренный графический порт
Интерфейс AGP предназначен для видеокарт; он используется с 1997 г. Скорость передачи данных у AGP 1x составляла 266 Мб/с. Более современные версии этого интерфейса (AGP 8x) пропускают до 2 Гб видеоданных в секунду.
[ http://www.morepc.ru/dict/]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > ускоренный графический порт
18 физическая среда
физическая среда
Физическая среда - в коммуникациях - материальная субстанция, через которую осуществляется передача сигналов.
Физическая среда служит основой для построения физических средств соединения. В качестве физической среды используются эфир, металлы, оптическое стекло и кварц.
[ Источник]
физическая среда
Любой физически возможный способ передачи сигналов между системами. Рассматривается вне модели OSI и иногда обозначается как нулевой уровень (Layer 0). Физическое соединение (соединитель, разъем) со средой можно рассматривать как определение верхнего интерфейса физического уровня, т. е. нижнюю границу модели OSI. Физическая среда определяет реальные физические интерфейсы. В сетях ATM используется широкий спектр физических интерфейсов, включая STS-1, STS-3c, STS12c, STM-1, STM-4, DS1, E1, DS2, E3, DS3, E4, интерфейсы на основе FDDI, оптических каналов и экранированного медного кабеля (STP). Эти среды обеспечивают скорость передачи в диапазоне от 1,544 до 622,08 Мбит/с.
[ http://www.lexikon.ru/dict/net/index.html]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > физическая среда
19 цифровое видео
цифровое видео
формат DV цифровой видеозаписи
Цифровой формат, где для сжатия используется вариант дискретного косинус-преобразования, аналогичный сжатию для формата JPEG, но с несколькими таблицами дискретизации. В DV-камере аналоговое видео YUV преобразуется перед записью на ленту в сжатый цифровой формат. Кодек DV сжимает звук и видео вместе в поток данных с постоянной скоростью 3,6 Мбайт/с. Это существенное отличие от M-JPEG, где скорость данных (и, следовательно, качество изображения и требования к аппаратуре) можно менять. На ленте DV записывается цифровой файл из нулей и единиц, примерно как на ленте для резервного копирования компьютерной информации. В этом заключается отличие от прежних форматов, таких, как Betacam, 3/4-дюймовая лента, Hi8 или вездесущий VHS, где на ленту записывался аналоговый сигнал, который затем можно было оцифровать на компьютере с видеоплатой M-JPEG. Для DV компьютерный монтаж осуществляется двумя способами. Во-первых, можно воспроизвести видео, подать его на аналоговый выход, а потом на вход традиционной системы сжатия M-JPEG, которая снова сожмет видео в другом стандарте. Второй, более предпочтительный, способ - с помощью интерфейса IEEE-1394 (другие названия - FireWire и i.LINK), что позволяет взять нули и единицы с ленты и передать на другой компьютер в цифровом виде. В этой статье я везде подразумеваю, что для монтажа DV используется цифровая передача. Кроме того, опять-таки для целей данной статьи, я везде говорю о DV вообще, а не о конкретном варианте - DVCAM, DVCPRO или потребительском DV. Это объясняется тем, что по качеству изображения между вариантами формата нет никакой разницы. (Источник - http://www.dnk.ru).
[ http://www.morepc.ru/dict/]Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > цифровое видео
20 цифровой интерфейс музыкальных инструментов
цифровой интерфейс музыкальных инструментов
Стандарт (разработан в 1983 г.), определяющий характеристики последовательного интерфейса (скорость 31,2 кбит/с) электронных музыкальных инструментов при совместном использовании с компьютером и другими устройствами.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
EN
Русско-английский словарь нормативно-технической терминологии > цифровой интерфейс музыкальных инструментов
См. также в других словарях:
скорость интерфейса — скорость передачи битов в интерфейсе скорость на стыке — [http://www.iks media.ru/glossary/index.html?glossid=2400324] Тематики электросвязь, основные понятия Синонимы скорость передачи битов в интерфейсескорость на стыке EN interface… … Справочник технического переводчика
скорость передачи интерфейса системы — Количество битов (двоичных цифр), передаваемых за единицу времени в цифровом сигнале через интерфейс системы. В одной кабельной системе может одновременно использоваться несколько скоростей передачи интерфейса (МСЭ Т G.972). [http://www.iks media … Справочник технического переводчика
скорость передачи данных в бодах — — [Е.С.Алексеев, А.А.Мячев. Англо русский толковый словарь по системотехнике ЭВМ. Москва 1993] скорость передачи данных Используется в различных ситуациях, например при настройке последовательного интерфейса между компьютером и принтеров.… … Справочник технического переводчика
Двунаправленный счётчик (элемент интерфейса программ) — Пример счётчика с текстовым полем и флажком Двунаправленный счётчик (или просто счётчик, англ. spinner) представляет собой графический виджет в GUI, как правило, ориентированн … Википедия
переменная скорость передачи, осуществляемой не в реальном времени — Тип неравномерного и критичного к задержкам трафика с переменной скоростью передачи, который свойственен режиму связи без установления соединения. Вид обслуживания nrt VBR предназначен для передачи коротких пакетных сообщений, к которым… … Справочник технического переводчика
RS-485 — Стандарт EIA RS 485 Физическая среда Витая пара Сетевая топология Точка точка, Multi dropped, Multi point Максимальное количество устройств 32 256 устройств (32 нагруженных) Максимальное расстояние 1200 метров Режим передачи Дифференциальный … Википедия
SATA (serial ATA, advanced technology attachment, последовательный интерфейс ATA) — Спецификация интерфейса Serial ATA, которая подразумевает подключение к системным платам ПК, ноутбуков и серверов устройств хранения данных класса винчестеров, DVD и CD RW приводов. Он значительно быстрее и экономичнее интерфейса PATA, кабель… … Глоссарий терминов бытовой и компьютерной техники Samsung
SATA (serial ATA, advanced technology attachment, последовательный интерфейс ATA) — Спецификация интерфейса Serial ATA, которая подразумевает подключение к системным платам ПК, ноутбуков и серверов устройств хранения данных класса винчестеров, DVD и CD RW приводов. Он значительно быстрее и экономичнее интерфейса PATA, кабель… … Глоссарий терминов бытовой и компьютерной техники Samsung
Apple iOS — У этого термина существуют и другие значения, см. IOS … Википедия
iOS — У этого термина существуют и другие значения, см. IOS (значения). iOS Разработчик Apple … Википедия
IEEE-488 — англ. Standard Digital Interface for Programmable Instrumentation кабель IEEE 488 с соед … Википедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с русского на английский
с английского на русский- С английского на:
- Русский
- С русского на:
- Все языки
- Английский
- Немецкий
- Французский